



















")










FUTABA Dual Link Power Hub DLPH-1
Product number:
9788979
Manufacturer number:
FPDLPH-1
GTIN/EAN:
4513886034879
Description "FUTABA Dual Link Power Hub DLPH-1"
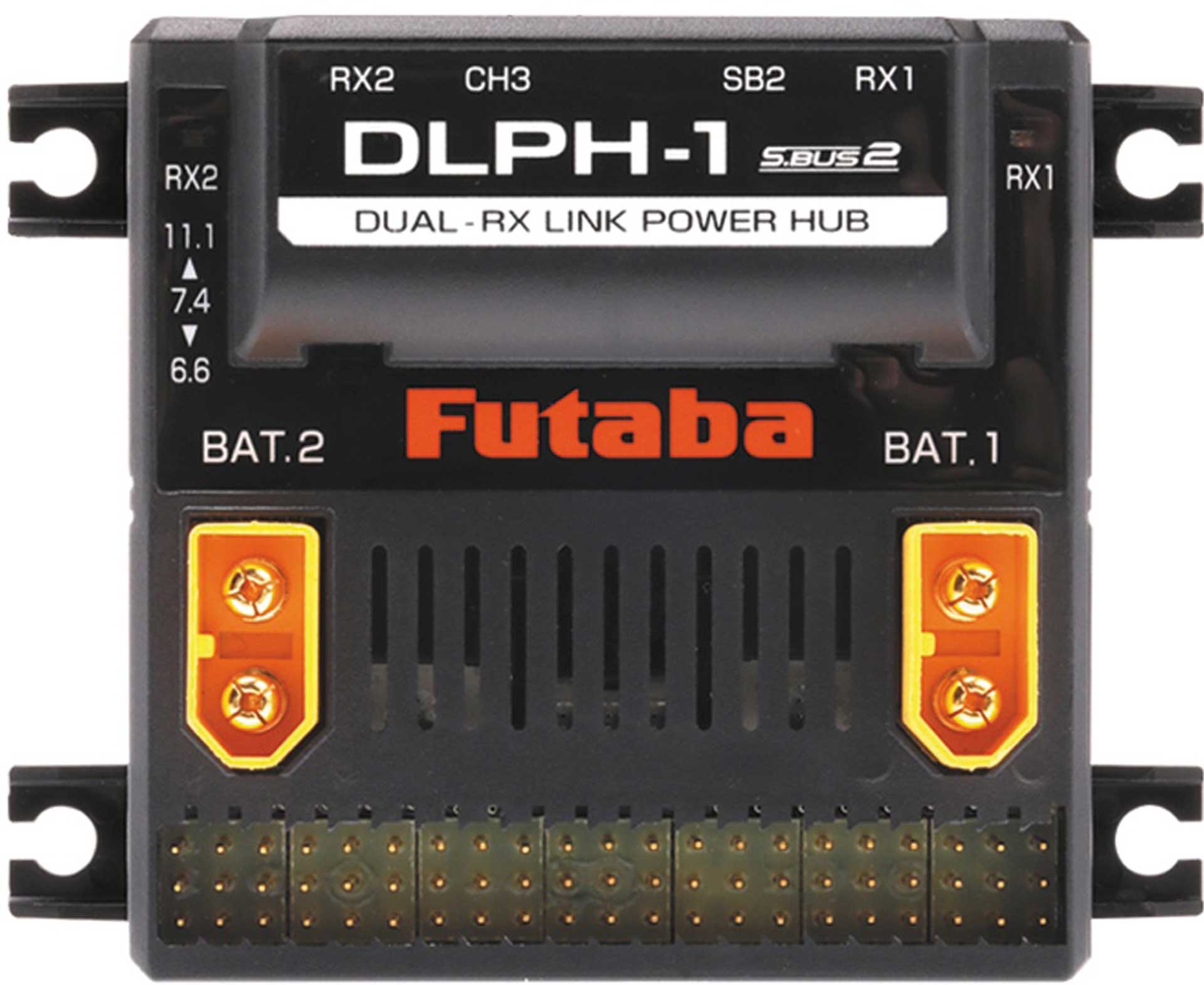
Futaba DLPH-1 - Link Unit for Dual Receivers and Dual Batteries + S.Bus Decoder
Dual Receiver System
For extra security, the DLPH-1 unit automatically switches to the second sub receiver if there is an issue with the main receiver. Then it automatically switches back to the main receiver when communication is recovered.
Dual Battery System
Two power supply batteries can be connected to the DLPH-1. Power is supplied from the battery with the highest voltage. The operating time is the total time of the 2 batteries. For example, even if the voltage of one battery drops, power can be supplied from the other battery. Even one battery can be used, but safer flight is possible if 2 batteries are used.
Use batteries with sufficient capacity for the specifications and number of servo motors to be used.
Specs:
Dual Receiver System
For extra security, the DLPH-1 unit automatically switches to the second sub receiver if there is an issue with the main receiver. Then it automatically switches back to the main receiver when communication is recovered.
Dual Battery System
Two power supply batteries can be connected to the DLPH-1. Power is supplied from the battery with the highest voltage. The operating time is the total time of the 2 batteries. For example, even if the voltage of one battery drops, power can be supplied from the other battery. Even one battery can be used, but safer flight is possible if 2 batteries are used.
Use batteries with sufficient capacity for the specifications and number of servo motors to be used.
Specs:
- S.BUS/S.BUS2
- Use: Two receivers and two batteries communication switching device
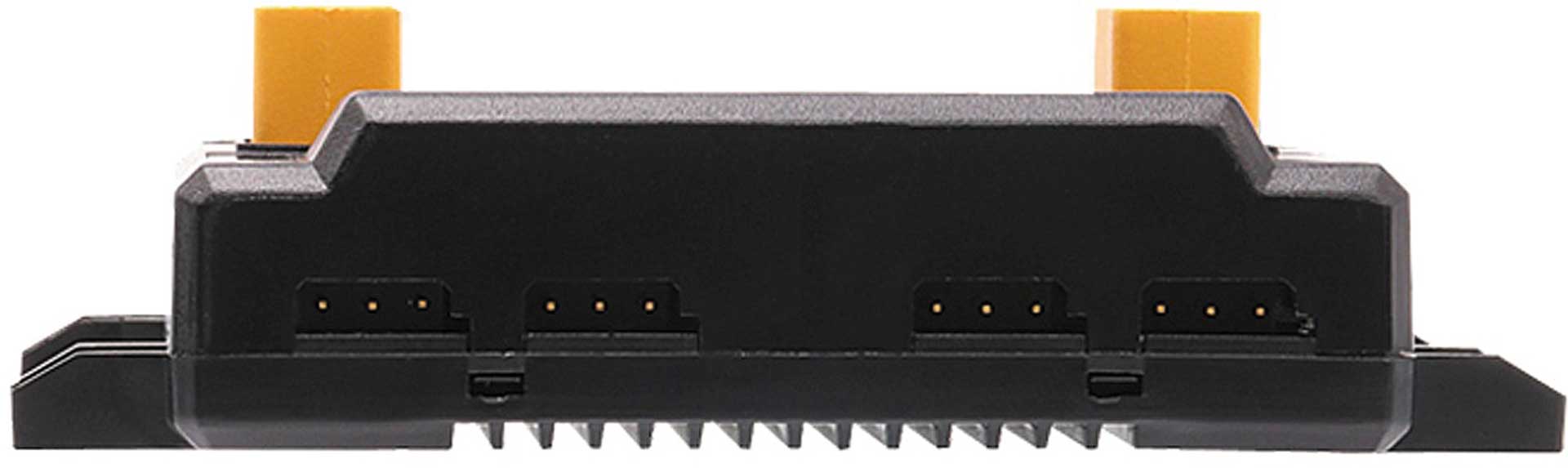
- Size: 62.8×62.4×18.1mm
- Weight: 50g
- FET rated: Always 60A / 2pcs
- Operating Voltage: DC6.4 to 13.0V
- Receiver Batteries (dual): 2S LiFe or 2-3S LiPo with XT60 connectors
- Accessories: Switch / Receiver connection cord x 2 / Mini screwdriver/ Flange damper / Eyelet / Wood screw
Box contents
- DLPH-1 Futaba Dual Link Power Hub
- Switch cable
- 2x patch cables for receiver
- Mini screwdriver
- mounting material
- Instruction manual